Repairing a 45-year-old Atari 810 Disk Drive


A couple days ago, after putting off the project for decades (you know, kids and all), I finally dug out the old Atari 800 I had as a kid. The 800 fired up after a bit of cleaning but I’m…
A couple days ago, after putting off the project for decades (you know, kids and all), I finally dug out the old Atari 800 I had as a kid. The 800 fired up after a bit of cleaning but I’m…
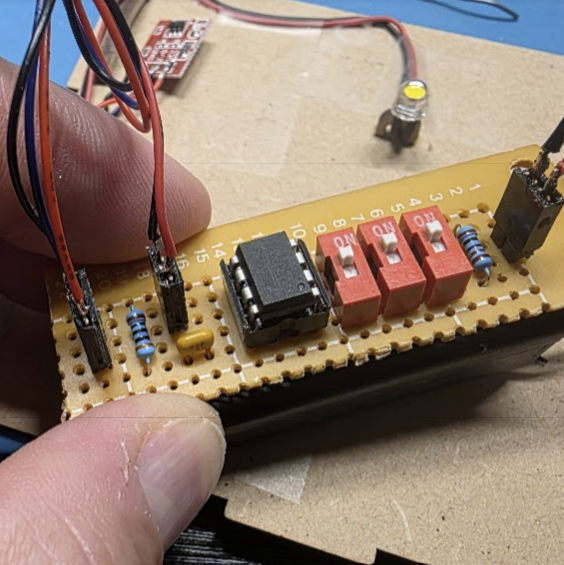
This is Part 2 of the BookNook Light Timer Series. Last time I introduced my BookNook Light Timer project and walked through how I planned to complete it using an ATtiny85 microcontroller. In this post, I wanted to unpack the…

I have this little SLA battery that enables my emergency generator to start without using the pull cord. I don’t have a maintainer on this batter (and maybe I should), so every once in a while I like to charge…
I use inexpensive TEMT6000 sensors in various projects to detect the level of ambient light. I originally hand-coded the firmware, but now I use ESPHome. My projects are usually 3.3V because I use pretty bare boards like ESP-12F instead of…
I have a bunch of ESPHome/ESP8266 projects, several of which are have been plagued by repeated disconnection during seemingly random times of instability. Sometimes they’ll be fine for days, and then suddenly they start acting up again, and it can…
[sc:3dclub-intro] Here’s a quick update on some of the projects we’ve been working on this year:
Random wires are ugly, so we decided to ask for some spare spiral binding coil at the local office supply store and walked away with a handful of 6mm and 10mm coils. They make for very nice wire wrap.
We made a video to show the difference in noise between the Pololu A4988 Stepper Motor Driver Carrier, which has 1/16 steps, and the DRV8825 Stepper Motor Driver Carrier which has 1/32 steps. These drivers are common in RepRap 3D…
[sc:3dclub-intro] In this video, Jacob shows an easy way to make very simple and inexpensive (yet dependable) bare wire end stops for your 3D printer (or other motion control project). This design helps to “demystify the box” by putting all…
[sc:3dclub-intro] 3D printers are an exciting new technology just starting to gain a foothold in schools. Once built, a printer facilitates many creative endeavors and links to math, science, art, and more. Building a 3D printer is a great project…